Figure steigert Roboter-Produktion um das 24-fache
In der BotQ-Anlage laufen die Bänder auf Hochtouren. Die gesammelten Flottendaten verbessern die Ganzkörperkontrolle erheblich.

Figure beschleunigt die Fertigung humanoider Roboter rasant. Die spezialisierte Anlage BotQ spuckt mittlerweile stündlich einen Figure 03 aus, was einer 24-fachen Steigerung der Produktionsrate innerhalb der letzten 120 Tage entspricht. Flankierend erhält das zugrundeliegende KI-Modell ein essenzielles Upgrade für die räumliche Wahrnehmung.
Von der Blaupause zur Serienfertigung
Ein Wechsel vom reinen Prototyp zur skalierbaren Flotte stellt in der Robotik eine große Hürde dar. Figure bewältigt diesen Schritt derzeit in der hauseigenen Produktionsstätte. Dort montieren über 150 vernetzte Arbeitsstationen die kritischen Hardware-Module des Roboters. Bisher verließen mehr als 350 Einheiten der dritten Generation die modernen Werkshallen.
Dabei legt der Hersteller großen Wert auf die Zuverlässigkeit der Bauteile. Strikte Qualitätskontrollen greifen bereits bei den Zulieferern und setzen sich nahtlos in über 50 Prüfstationen während der Montage fort. Am Ende der Fertigungslinie liegt die Erstdurchlaufausbeute folglich bei über 80 Prozent. Vor der Auslieferung absolviert jeder Roboter zudem ein intensives Belastungsprogramm mit Kniebeugen und Schulterdrücken. Dadurch lassen sich frühe mechanische Ausfälle verlässlich minimieren.
Twitter Beitrag - Cookies links unten aktivieren.
Today we’re giving an update on ramping F.03 production at BotQ
— Figure (@Figure_robot) April 29, 2026
In the last 120 days, Figure scaled manufacturing 24x - from 1 robot/day to 1 robot/hour
We will manufacture 55 humanoid robots this week pic.twitter.com/Am5Kn53mVE
Eine wachsende Flotte sammelt Trainingsdaten
Jeder fertiggestellte Figure 03 liefert im realen Einsatz ununterbrochen wertvolle Informationen. Diese enormen Datenströme fließen direkt in das multimodale KI-Modell Helix. Entsprechend bedeutet eine breitere Flotte auch eine deutlich verbesserte Datenbasis für das Training. Fehler, die im Labor oft unsichtbar blieben, treten nun zutage und lassen sich frühzeitig beheben.
Softwareseitig implementierten die Ingenieure sogenannte Fallback-Szenarien. Fällt ein nicht-kritisches Bauteil aus, verringert der Roboter seine Leistung sanft, anstatt abrupt abzuschalten. Parallel verwaltet eine zentrale Server-Architektur die gesamte Hardware autonom. Neue Verhaltensweisen sowie wichtige Aktualisierungen erreichen sämtliche Einheiten simultan über drahtlose Netzwerk-Updates. Damit verringern die Entwickler aktiv die unberechenbare »Long Tail« der Edge-Case-Fehler.
Anzeige
Visuelle Wahrnehmung für komplexes Terrain
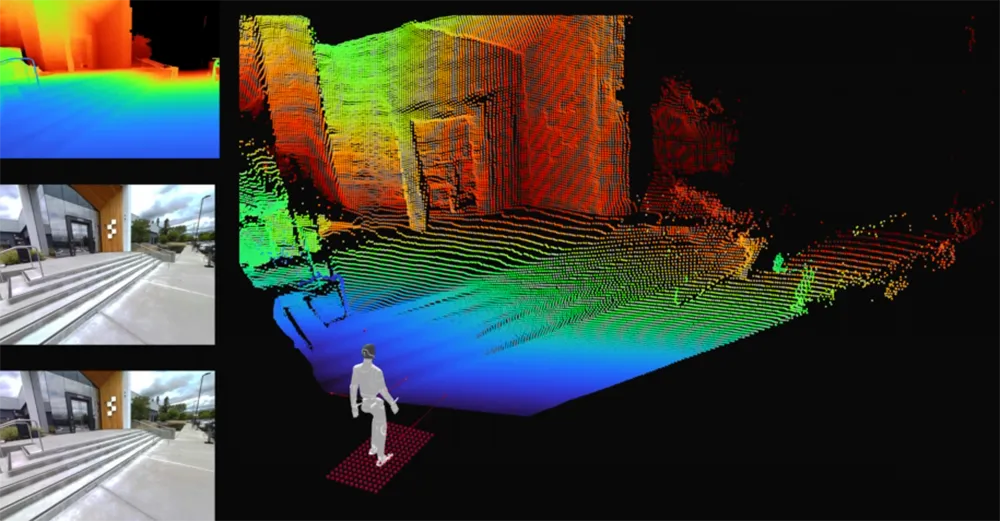
Dieses vergrößerte Datenvolumen ermöglichte kürzlich einen Durchbruch bei der Steuerung. System 0, ein KI-Modell für die reibungslose Ganzkörperkontrolle, verlässt sich fortan nicht mehr nur auf den blinden Tastsinn. Integrierte RGB-Kameras im Kopf erfassen die physische Umgebung und wandeln die Bilder in eine dreidimensionale Repräsentation um. Das Modell sieht nun exakt den Boden, bevor der Roboterfuß aufsetzt.
Quelle: Figure
Ein Training dieser Richtlinien erfolgt vollständig durch Reinforcement Learning in einer Simulation. Die dort erlernten Gewichtungen übertragen sich anschließend ohne weitere Anpassungen in die Realität. Dieser Zero-Shot-Transfer demonstriert eindrucksvoll, wie System 0 komplexe Treppen und unebenes Gelände im ersten Versuch sicher meistert. Zukünftig übernimmt diese Architektur die Steuerung für noch weitreichendere Bewegungsabläufe in anspruchsvollen Umgebungen.